




 info@aprobacia.ru
info@aprobacia.ru
 тел.:+7 989 669 15 15
info@aprobacia.ru
тел.:+7 989 669 15 15
тел.:+7 989 669 15 15
info@aprobacia.ru
тел.:+7 989 669 15 15
Введение
Формирование требований к автоматизированной системе в соответствии с нормативными документами [1] выполняется на предпроектной стадии создания информационных систем. Эти требования будут учтены в дальнейшем при разработке концепции системы.
Целесообразность создания системы
Определение геометрических параметров (формы, размера, пространственного положения) и других свойств объектов по их изображениям является одной из наиболее актуальных задач фотограмметрии. Фотограмметрические средства измерений могут быть задействованы при решении широкого круга задач в процессе строительства, например при проведении геодезических работ, или при оценке процессов деформации зданий, мостов и других сооружений. Результаты измерений, полученные такими средствами, отличаются точностью и достоверностью, так как съемка объектов на местности выполняется прецизионными фотокамерами, а обработка снимков проводится строгими методами на точных приборах и программных комплексах. Высокая производительность труда достигается, благодаря тому, что измеряют не сами объекты, а их изображения. Но главное преимущество применения таких систем заключается в том, что работы можно проводить дистанционным методом, что имеет особое значение в условиях, когда пребывание в зоне работ не безопасно для жизни человека.
Тем не менее, дальность проводимых измерений фотограмметрическими средствами сильно ограничена и не может конкурировать с такими геодезическими приборами, как электронный тахеометр или теодолит. С другой стороны, хотя геодезические приборы и являются высокоточными средствами измерений, они в отличие от фотограмметрической системы не способны за короткий промежуток времени выполнить комплексные измерения, направленные на определение формы или ориентации объекта в пространстве. Также геодезические приборы лишены способности самостоятельно производить поиск требуемого объекта и отслеживать его перемещение в пространстве.
Снижение скорости проведения измерительного процесса с помощью геодезических приборов обусловлено еще и необходимостью установки визирных целей, наведение на которые занимает много времени и требует слаженного взаимодействия нескольких геодезистов. Благодаря последним успехам, достигнутым в области развития беспилотных летательных аппаратов, данная проблема может быть существенно упрощена. Установка визирной цели на летательный аппарат позволит в разы сократить время на проведение измерений, автоматизировать процесс и значительно снизить трудозатраты.
Соответственно возникает необходимость интеграции приведенных систем, которая позволила бы реализовать их преимущества и устранить недостатки, значительно расширить диапазон и область совместного применения. Это послужило основанием для разработки следящей оптической координатно-измерительная системы (СОКИС), призванной решать координатно-измерительные задачи с точностью измерений не уступающей геодезическим приборам и при этом обеспечивать функциональность и производительность фотограмметрических систем.
Назначение, состав и требования, предъявляемые к системе
Подобная система относится к области информационно-измерительных систем и предназначена для решения задач связанных с измерением дальности, линейных размеров и координат объектов. Система должна обладать возможностью автоматического поиска и обнаружения объекта в зоне прямой видимости, отслеживать его перемещение в пространстве и определять координаты в режиме реального времени.
Для разработки системы требуются следующие компоненты:
- ЭВМ, с установленным специальным программным обеспечением (СПО).
- Двухосевая платформа, задающая направление обзора видеокамеры.
- Микроконтроллер, обеспечивающий интерфейс взаимодействия между ЭВМ и компонентами системы.
- Шаговые двигатели, непосредственно изменяющие угол поворота платформы.
- Драйвер шаговых двигателей, устанавливающий кратность их шага, что обеспечивает максимальную точность управления углом поворота платформы.
- Абсолютные оптические энкодеры, которые выдают цифровой код, характеризующий угловое значение поворота осей платформы.
- Лазерный дальномер, определяющий расстояние до визирной цели.
- Видеокамера высокого разрешения, оснащенная вариообъективом с изменяемым фокусным расстоянием для поиска мишени и целеуказания.
- БПЛА, оснащенный дальномером.
- Визирная цель (мишень), которая может быть подвешена к БПЛА.
- ГНСС-приемник, для определения координат.
Принцип действия
На рис.1. представлен принцип действия одного из возможных вариантов применения СОКИСдля определения координат объектов, расположенных на поверхности земли.
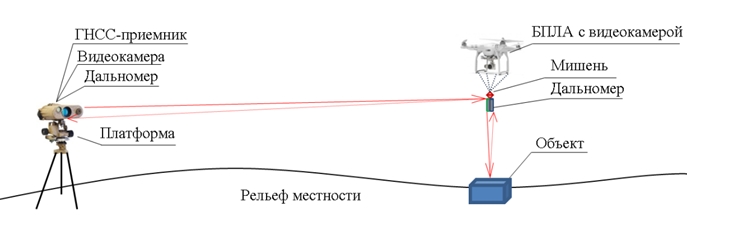
Рис. 1. Принципиальная схема следящей оптической
координатно-измерительной системы, для определения координат
объектов, расположенных на поверхности земли.
Лазерный дальномер, установлен на платформе, обладающей двумя степенями свободы, что позволяет произвести его точное наведение на визирную цель, как в вертикальной, так и в горизонтальной плоскостях. Изменение углов поворота платформы обеспечено за счет шаговых двигателей, получающих команды от микроконтроллера, который в свою очередь находится под управлением ЭВМ. Углы поворота определяются с помощью абсолютных оптических энкодеров, закрепленных на осях платформы. Это позволяет вычислить относительные координаты визирной цели, прикрепленной к БПЛА.
Видеокамера установлена на платформе, таким образом, что ее оптическая ось сонаправлена лазерному лучу дальномера, благодаря чему производится наведение дальномера на мишень, прикрепленную к БПЛА.
СПО, функционирующее на ЭВМ, обрабатывает потоковое видео, формируемое видеокамерой с целью обнаружения мишени. При обнаружении мишени рассчитываются углы отклонения центра мишени от оптической оси видеокамеры, и формируется управляющая команда на микроконтроллер, который с помощью шаговых двигателей и драйвера наводит лазерный луч дальномера на мишень. Отслеживание и наведение на мишень производится системой автоматически в режиме реального времени. Высота БПЛА над поверхностью объекта h может быть определена вторым дальномером, прикрепленным к летальному аппарату.
Задача оператора состоит в управлении БПЛА, визуальном обнаружении цели с помощью, установленной на летательном аппарате видеокамеры, и зависанием над объектом, координаты которого рассчитываются и отображаются на ЭВМ.
Координаты объекта определяются в собственной сферической системе координат СОКИС (рис.2), по измеренным, с помощью энкодеров значениям углов наклона θ и поворота φ, а также расстояния r до отражателя, определяемого дальномером.
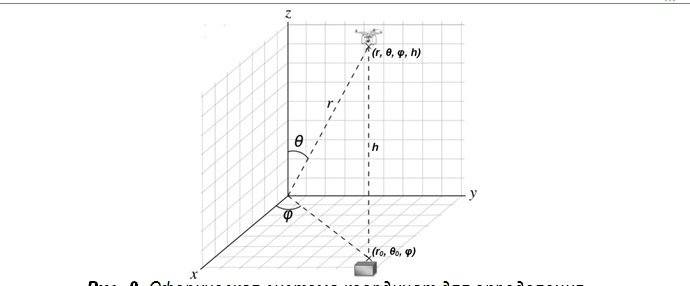
Рис. 2. Сферическая система координат для определения
относительного положения объекта.
За начало координат (x0, y0, z0) принимается текущее положение системы. Координаты мишени (r, θ, φ, h), прикрепленной к БПЛА включают также высоту h над поверхностью объекта, что необходимо для вычисления его координат (r0, θ0, φ) в соответствии с формулой:
Для перевода координат из собственной системы в геоцентрическую систему координат, необходимо знать координаты положения системы и направление на север, это может быть осуществлено с помощью ГНСС – приемника и цифрового компаса.
Определение технических и метрологических характеристик
Характеристики СОКИС определяются за счет характеристик, входящих в ее состав, компонентов. К примеру, современный лазерный дальномер способен определять расстояние до объекта, в зависимости от его отражающей поверхности, на дистанции до 3 км с погрешностью измерения ±20 мм. Как было показано в [2], современная видеокамера высокого разрешения, оснащенная объективом с 30-кратным оптическим увеличением, способна в зоне прямой видимости обнаруживать мишень радиусом 50 мм приблизительно на такой же дистанции. На рис. 3 схематично отображена зависимость размера области сцены в кадре от угла обзора.
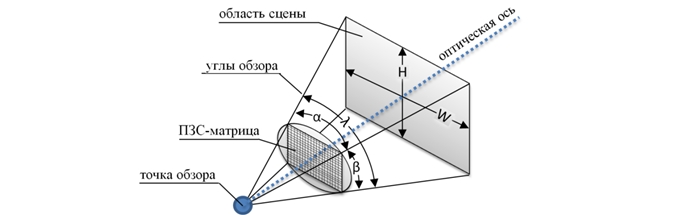
Рис. 3. Область сцены, попадающая в кадр видеокамеры
в зависимости от угла обзора.
Зона обзора видеокамеры имеет форму конуса, но из-за прямоугольной формы ПЗС-матрицы представляет собой пирамиду. В результате этого, угол обзора λ, подразделятся на горизонтальный и вертикальный – α и β, соответственно. Чем больше фокусное расстояние объектива, тем меньше угол обзора [3], некоторые длиннофокусные объективы обладают малым углом обзора, порядка 5°, что приблизительно (для матрицы с соотношением сторон 2/3) составляет 3° по горизонтали и 2° по вертикали. Шаг изменения значения угла, фиксируемый видеокамерой зависит от размера пикселя ее ПЗС-матрицы. Если принять во внимание, что современная видеокамера способна снимать видео с разрешением 1920х1200 и более, то отклонение оптической оси от центра изображения мишени на один пиксель по горизонтали или вертикали составит:
Абсолютный оптический энкодер обеспечивает гораздо более высокую точность угловых измерений. Таким образом, погрешность угловых измерений системы должна составить не более 6", что сопоставимо с погрешностью измерений электронного теодолита.
Дивергенция лазерного луча современного дальномера достигает в среднем 0,6 mrd, то есть при дистанции 10 м диаметр луча будет 6 мм, а при 1 км - 600 мм. Соответственно наведение на мишень должно производиться с погрешностью не более . Драйвер шагового двигателя способен обеспечить величину шага двигателя гораздо меньшую, чем требуемое значение, следовательно, система будет способна произвести наведение на мишень с достаточной точностью, необходимой дальномеру для проведения измерений.
Формирование основных требований к системе
Проведя анализ существующих средств измерений линейных и угловых величин, а также обосновав целесообразность создания следящей оптической координатно-измерительной системы, были определены следующие основные требования, предъявляемые к системе в целом и к ее функциональным возможностям в частности:
1. Разрабатываемая система должна решать координатно-измерительные задачи с точностью измерений не уступающей геодезическим приборам и при этом обеспечивать производительность и функциональность фотограмметрических систем.
2. Система должна обладать возможностью автоматического поиска и обнаружения мишени или объекта в зоне прямой видимости, отслеживать перемещение в пространстве и определять его координаты в режиме реального времени.
3. Технические и метрологические характеристики системы должны определятся характеристиками входящих в ее состав компонентов, которые на данный момент способны обеспечивать измерение дальности, линейных размеров и координат объектов на дистанции до 3 км с погрешностью измерения ±20 мм и угловой погрешностью определения координат объектов не более 6".
4. Для разработки системы необходимо осуществить подбор или изготовление таких компонентов, которые будут удовлетворять заданные требования и при этом обеспечивать слаженное взаимодействие в составе измерительной системы.
5. Требования к видам обеспечения (информационному, техническому, программному и т.д.) будут сформулированы позже, на следующих стадиях разработки.
Список литературы:
1. Комплекс стандартов на автоматизированные системы. Стадии создания. // ГОСТ 34.601 – 90, 1990
2. Рощин, Д. А. Оценка возможностей фотокамеры в качестве средства измерения расстояний / Д.А. Рощин // Сборник материалов 11-й международной научно-практической конференции "Актуальные проблемы современной науки в 21 веке", - Махачкала: ООО “Аппробация”, 2016. – 80 с.
3. Дамьяновски, В. Библия видеонаблюдения. Цифровые и сетевые технологии. / В. Дамьяновски, - М.: OOO «Ай-Эс-Эс Пресс», 2006. – 480 с.

